Радары Великобритании

Содержание
История развития радиолокации в Великобритании

Роберт Уотсон-Уотт (англ. Robert Watson Watt), работник Метеорологической службы, в течении длительного времени занимался разработкой радиоприбора, фиксирующего параметры атмосферных электрических разрядов. Необходимость выявления направления на источник кратковременных сигналов привело его в 1927 году к созданию системы направленных вращающихся антенн, сигнал с которых подавался на осциллограф. По сути этот прибор был прообразом радиопеленгатора.
В 1934 в Великобритании был создан комитет по научным исследованиям противовоздушной обороны (англ. Committee for Scientific Survey of Air Defence(CSSAD)), одним из сотрудников которого стал Уотсон-Уотт. Ход дальнейших исследований во многом был предопределен статьей одной из бульварных газет о якобы разработанных в Германии огромных радиоизлучателях «лучей смерти». Члены комитета отнеслись к этой новости с известной долей скептицизма, но все же решили связаться с одним из специалистов в области радиотехники, Арнольдом Уилкинсом, для получения обоснованных комментариев по поводу таинственных лучей. В январе 1935 года были проведены теоретические расчеты, которые позволили сделать вывод о фантастичности заявлений о «лучах смерти», но сами расчеты показали, что в случае отражения радиоволн от различных предметов, находящихся на значительном удалении, отраженный сигнал будет иметь достаточный уровень для его приема и отображения на экране осциллографа. В течение нескольких недель Уилкинс подготовил доклад, в котором изложил общую идею по приему отраженных радиоволн. Он также привел подробные расчеты необходимой мощности передатчика, характеристики отражения сигнала от воздушного судна и параметры чувствительности приемника. Уилкинс предложил использовать направленный приемник, основанный на идее обнаружения молний Уотсон-Уотта. Время задержки отраженного сигнала позволяло измерить расстояние до воздушного судна, отразившего сигнал. 12 февраля 1935 года Уотсон-Уотт послал эту информацию в министерство авиации в секретном докладе под названием «Обнаружение воздушных судов методами радиосвязи».
Министерство авиации скептически отнеслось к идее Уилкинса, так как отражение радиосигналов в то время было не подтверждено практическими опытами. Для доказательства своей идеи Уилкинс провел научный эксперимент. 26 февраля 1935 года бомбардировщик Handley Page Heyford полетел между принимающей станцией, установленной в Нортгемптоншире и передающей радиовещательной станцией BBC в Давентри. Отраженный самолетом сигнал был принят приемником Уилкинса. Доказательством отражения сигнала было возникновение доплеровского сдвига частоты[1], который возникает при отражении радиоволн от движущихся предметов. Таким образом эксперимент позволил не только определить, что самолет находится на расстоянии 13 км от приемника, но и рассчитать его скорость. Это убедительный тест, известный как эксперимент Девентри, был представлен министерству авиации и оно приняло решение о постройке полноценной демонстрационный системы.

Постройка велась на военном полигоне Орфорд Несс в Саффоле на побережье Северного моря. В середине мая 1935 года было построено 6 передающих и 4 приемных башни. В июне началось общее тестирование. 17 июня летающая лодка Supermarine Scapa была обнаружена на дистанции 27 км. Таким образом, этот день можно считать днем зарождения британской радиолокации. Уотсон-Уотт, Уилкинс и конструктор передатчика Эдвард Боуен предложили назвать их установку радар — от RAdio Detection And Ranging (RADAR) — радиообнаружение и определение дальности.[2]
В декабре 1935 года британский министр финансов выделил 60000 фунтов стерлингов для постройки системы из пяти станции под названием Chain Home (CH), охватывающих подходы к устью Темзы.
В конце 1935 года Боуэн предложил использовать бистатический радар, передатчики которого устанавливались бы на земле, а приемники — размещались на самолетах. Таким образом было положено начало разработки радаров для перехвата воздушных целей (AI), а позже, когда случайно была открыта возможность обнаружения кораблей — радаров обнаружения надводных целей (ASV).
В 1940 году Джон Рэндалл и Гарри Бут доработали электронную лампу - магнетрон, который позволил использовать в радарах 10-см диапазон волн. Это компактное устройство позволило совершить настоящий прорыв в радиолокации, так как было способно генерировать радиоимпульсы в диапазоне 10 см, благодаря чему требовались компактные антенны радаров, свободно размещавшиеся на самолетах, а сами волны позволяли обнаруживать подводные лодки, движущиеся на перископной глубине.
РЛС Великобритании
Наземные РЛС
РЛС сети раннего обнаружения Chain Home

В декабре 1935 года на восточном побережье Англии вступили в строй первые станции дальнего обнаружения самолетов сети Chain Home AMES Type 1 (англ. Air Ministry Experimental Station — опытная станция воздушного министерства тип 1) . Станции работали в диапазоне 23-30 МГц при мощности передатчика 200 КВт, позже мощность была увеличена до 800 КВт. Антенны передатчика были выполнены в виде башен высотой 118 метров, приемные антенны имели высоту 80 м. Хотя РЛС Chain Home не могли работать со сканирующим импульсом, за счет устройства приемной антенны они позволяли определить дальность, азимут и высоту обнаруженной цели. Максимальная дальность обнаружения составляла 175 км, но при этом РЛС AMES Type 1 не могли обнаруживать низколетящие цели.
В 1939 года сеть была дополнена станциями сети Chain Home Low AMES Type 2, работавшие на частоте 200 МГц и имевшие вращающуюся с частотой 1-3 оборота в минуту антенну. Станции Chain Home Low использовались для обнаружения как самолетов, так и кораблей на удалении до 200 км.
В 1943 была введена в строй сеть станций Chain Home Extra Low AMES Type 13/14, работавшие на частоте 3 ГГц и обладавшие более высокой разрешающей способностью.
Для устранения брешей в сплошном радиолокационном поле Chain Home были также разработаны мобильные РЛС Type 6, Type 8, Type 10 и Type 12, а также радиовысотомеры VEB и Type 13.
Станции наведения перехватчиков Ground Controlled Intercept (GCI)

Сеть Chain Home была разработана в первую очередь для раннего предупреждения, однако уже в начале Второй мировой войны возникла необходимость наведения истребителей на обнаруженные цели. Если в дневное время точность Chain Home позволяла летчику подойти к цели на расстояние визуального контакта, то во время ночных налетов обнаружение бомбардировщиков было крайне затруднительно. Для точного наведения стали использоваться бортовые самолетные РЛС, но их применение было связано с рядом проблем и задача точного наведения на цель стала решаться с помощью наземных РЛС наведения перехватчиков (англ. Ground Controlled Intercept (GCI)).
Первая серийная станция наведения перехватчиков AMES Type 7 работала на частотах 193—209 МГц при мощности до 100 КВт и имела дальность обнаружения до 150 км. Ранние РЛС отображали отметки от цели на трех индикаторах: дальности, угла места и азимута. Главным отличием новых станций наведения стало применение индикатора кругового обзора, на котором отображалась отметка и от цели и от перехватчика. Таким образом оператор РЛС передавал летчику его положение относительно цели в угловых координатах, благодаря чему точность наведения значительно возрастала.
Помимо стационарных РЛС были также разработаны передвижные AMES Type 8 и мобильные, смонтированные на автомобильном шасси Type 11(500—600 Мгц, 50 Квт).
Корабельные РЛС
Универсальные обзорные РЛС

Уже на заре радиолокации стало очевидно, какое огромное преимущество могут иметь корабли, оборудованные радарами. В середине 1930-х годов был проведен ряд экспериментов, которые доказали все преимущества оснащения военно-морских сил радиолокационной техникой. Уже в октябре 1936 года первый образец РЛС Type 79X (75 МГц, 70 КВт, 31 км) был установлен на тральщике HMS Saltburn. Позже доработанная РЛС Type 79Y (43 МГц, 20 КВт, 98 км) была установлена на крейсер HMS Sheffield. Первые серийные образцы РЛС Type 79 (43 МГц, 70КВт, 100 км) были установлены на крейсер HMS Curlew и линкор HMS Rodney. Всего было выпущено 40 РЛС Type 79.
РЛС Type 268 (9386 MГц, 40 КВт, 115 км) с 1940 года устанавливалась на эсминцы типа Hunt и тральщики типа Algerine. РЛС предназначалась для обнаружение кораблей и безопасной навигации в сложных погодных условиях.
Радар Type 271 (3000 MГц, 90 КВт, 25 км) впервые был установлен на корвет HMS Orchis и активно использовался с марта 1941 для поиска немецких подводных лодок. Радар мог обнаружить всплывшую на перископную глубину подводную лодку на удалении 10 км и активно использовался на корветах и фрегатах, сопровождавших конвои в Северном море. На РЛС Type 271 впервые в морской практике был применен индикатор кругового обзора.
Обзорные РЛС Type 272 (3000 MГц, 90 КВт, 40 км) стали одной из самых массовых моделей радаров в британском флоте и устанавливалась на корабли любых типов.
РЛС Type 273 (3000 MГц, 90 КВт, 185 км) была создана на базе Type 273. Именно эта РЛС, установленная на HMS Duke of York, обнаружила немецкий линкор Scharnhorst на дистанции 41 км, что послужило предпосылкой боя у Нордкапа.
Type 279 (43 MГц, 70 КВт, 93 км) был модификацией Type 79 и начал разрабатываться в 1940 году. Этот радар имел раздельные антенны для передатчика и приемника (модификация Type 279M — совмещенную антенну) и устанавливался в качестве радара раннего предупреждения на легкие крейсера. Использовался совместно с аналоговым компьютером управления огнем HACS (High Angle Control System).
Type 280 (85 MГц, 25 КВт, 70 км) являлся морской модификацией РЛС ПВО GL Mark I и с 1940 года устанавливался на легкие крейсера типа С. Как и Type 279, мог использоваться совместно с аналоговым компьютером управления огнем HACS.
Type 281 (90 MГц, 1000 КВт, 210 км) был разработан в 1940 году для замены устаревших РЛС Type 79 и отличался прежде всего повышенной мощностью и дальностью обнаружения цели. Использовался на крейсерах ПВО Dido и линкорах типа King George V (1939).
Радар Type 284 (600 MГц, 25/150 КВт) устанавливался в качестве РЛС корректировки огня на тяжелые крейсера типа County. Его особенностью было использование переключение лепестков направленности антенны в вертикальной плоскости, благодаря чему можно было оценить высоту полета воздушных целей и отличить отметки самолетов от отметок кораблей.
Type 285 (600 MГц, 25/150 КВт) использовался для обнаружения целей и управления зенитным вооружением со применением компьютеров управления огнем HACS и дальномер-директоров. Антенная система имела возможность переключения лепестков диаграммы направленности в вертикальной плоскости.
РЛС Type 286 (214 MГц, 25/150 КВт, 30 км) устанавливалась на корветы класса Bathurst начиная с февраля 1940 года. Разрабатывались как корабельный вариант авиационной РЛС ASV Mark II. Позднее были доработаны и получили обозначение Type 290.
РЛС обнаружения воздушных целей Type 291 (214 MГц, 100 КВт, 164 км) стала дальнейшим развитием Type 290 и размещалась на крейсерах, эсминцах, тральщиках и корветах различных типов.
Type 293 (3000 MГц, 500 КВт, 161 км) появился в конце войны и устанавливался главным образом на линейные корабли и тяжелые крейсеры.
РЛС целеуказания

РЛС обнаружения воздушных целей и корректировки стрельбы Type 262 (9700 MГц, 30 КВт, 75 км) устанавливалась на турельные установки зенитных 40-мм автоматических пушек Bofors.
РЛС Type 274 (3300 MГц, 400 КВт) предназначалась для корректировки огня орудиями главного калибра. Точность определения координат цели составляла 90 м по удалению и 0,005 градуса по азимуту. Устанавливалась на линкоры и крейсера с 1943 года.
Корабельная РЛС Type 275 (3526 MГц, 400 КВт) являлась модификацией РЛС Type 285 и предназначалась для корректировки огня зенитной артиллерии и орудий вспомогательного калибра. Устанавливалась на HMS Vanguard и HMS Anson и эсминцы различных типов.
Радар Type 282 (600 MГц, 25 КВт) устанавливался на многоствольные зенитные установки Vickers «pom-pom» и Bofors, использовался в составе системы корабельной ПВО "Pom-Pom director Mark IV".
РЛС Type 283 (600 MГц, 25 КВт) была аналогична Type 282, но предназначалась для работы в составе систем заградительного зенитного огня, который велся из орудий калибра 152 мм.
РЛС подводных лодок
РЛС Type 267 Seaguard (9700 MГц, 30 КВт, 180 км) была разработана на базе корабельной РЛС Type 291 и предназначалась для установки на подводные лодки типа T и Amphion.
Авиационные РЛС

РЛС сеть раннего обнаружения Chain Home позволяла выводить на цель истребители с точностью в несколько километров, что было достаточно для визуального обнаружения днем, но ночью требовалась более высокая точность. Первое время для ночного наведения использовались радиопрожекторные станции, в которых осветительный прожектор был совмещен с направленными антеннами РЛС[3]. Позже на самолеты-перехватчики стали устанавливать компактные РЛС. Эти РЛС обладали малой дальностью действия, поэтому первоначальное наведение выполнялось по данным с наземных РЛС, а затем цель перехватывалась бортовым локатором. Для вычисления дальности на цели на самолетных РЛС использовалась сканирующая спиральная развертка.
Разработки авиационных РЛС в Великобритании начались в 1936 году. Первая разработанная система, RDF 1.5, предполагала создание сети наземных РЛС, сигналы с которых принимались бы на борту самолетов. Но такая концепция требовала создания огромного числа излучающих РЛС, что было неосуществимо в те годы. Было решено устанавливать и приемник, и передатчик на борт самолета, но разработчики столкнулись с проблемами обеспечения питания мощных передатчиков и высоким уровнем помех от системы зажигания двигателей и все дальнейшие работы велись с целью снижению потребляемой мощности и масс-габаритных характеристик радаров.
РЛС обнаружения надводных целей
В ходе тестирования различных образцов ранних РЛС случайно была обнаружена возможность обнаружения кораблей, причем на достаточно большом удалении. Самолет-разведчик Avro Anson, оборудованный экспериментальным радаром, в одном из полетов обнаружил четкие сигналы, при дальнейшем изучении выяснилось, что были обнаружены корабли, находящиеся в доках Харвича. В результате этого случая разработка РЛС обнаружения морских целей была выделена в отдельную разработку "радиолокаторов для обнаружения надводных целей" Aircraft to Surface Vessel (ASV). Итогом этой разработки стало принятие на вооружение РЛС обнаружения надводных целей ASV II, с помощью которой во время войны был обнаружен немецкий линкор Bismarck. В 1943 году была выпущена модификация РЛС ASV III/XI, которая сыграла значимую роль в ходе противолодочных операций.
Впервые станция ASV была испытана на маневрах в сентябре 1938 года, а с 1941 года англичане начали ее активное применение для обнаружения всплывших подводных лодок противника, обнаруживая их на удалении до 20 км.
РЛС перехвата воздушных целей
Первая авиационная РЛС AI Mark I была передана на вооружение 11 июня 1939 года. Из за большого веса ее устанавливали на тяжелые истребители-перехватчики Bristol Beaufighter, созданные на базе бомбардировщика-торпедоносца Bristol Blenheim. Уже в мае следующего года новая модель, AI Mark II поступила на вооружение 6 эскадрилий перехватчиков, а в результате взаимодействия с группой разработчиков РЛС обнаружения морских целей ASV была разработана модель AI Mark III.

Громоздкие РЛС было невозможно установить на легкие истребители, поэтому в 1940 году как альтернатива авиационным РЛС были разработаны наземные РЛС наведения перехватчиков Ground Controlled Intercept(GCI). Несмотря на это, авиационные РЛС продолжали развиваться, был налажен выпуск РЛС AI Mark IV А и AI Mark V, но радикальные изменения произошли после разработки РЛС AI Mark VI. Благодаря развитию технологий, новый радар мог быть установлен на одномоторные истребители типа Hawker Typhoon, а индикация целей выводилась не на два экрана, как раньше, а на один, что значительно упрощало действия летчика.
Более поздние разработки, AI Mark VIII, и AI Mark Mark IX и разрабатывались для для тяжелых истребителей, бомбардировщиков и торпедоносцев. Модель AI Mark Mark X была копией американского радара SCR-720. AI Mark XI, AI Mark XII и AI Mark XIII стали первыми радарами Х-диапазона волн (8-12 ГГц) и устанавливались на истребители Fairey Firefly. Модели AI Mark XIV и AI Mark XV предназначались для использования на самолетах морской авиации и устанавливались на американские палубные самолеты F6F Hellcat и F4U Corsair.
Для обнаружение целей на поверхности были разработаны РЛС типа H2S, который использовался главным образом при ночных бомбардировках.
См. также
Радар
Радары Германии
Радары США
Радары СССР
Радары Японии
Радары Второй мировой войны
Примечания
- ↑ Эффект Доплера связан с изменением частоты и длины волн, регистрируемых приёмником, вызванным движением их источника и/или приёмника, а также движением отражающей поверхности в случае приема отраженных сигналов.
- ↑ По другой версии, название RADAR было предложено американцами.
- ↑ Аналогичные системы использовались в СССР.
Использованная литература и источники
Список литературы
Наземные американские и английские радиолокационные станции. — Москва: Военное издательство министерства вооружённых сил союза ССР, 1947.
Ссылки
Air Ministry Experimental Station (англ.)
The Radar Pages(англ.)
Naval Radar Museum(англ.)
The Pacific War Online Encyclopedia(англ.)
Галерея изображений
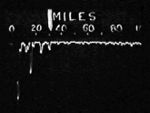
Индикатор дальности РЛС Chain Home
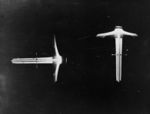
Сдвоенный индикатор AI Mk.IV. Цель находится на той же высоте, правее перехватчика.

РЛС Type 281B, установленная на HMS Swiftsure

Антенна Type РЛС 291W на мостике подводной лодки HMS Shakespeare (P221)

Система управления корабельной ПВО HACS Mark III с радаром Type 285

Щелевая антенна РЛС ПВО Type 274

1448.jpg)



